| GENE SLOVER'S US NAVY FIRE CONTROL PAGES NAVAL ORDNANCE AND GUNNERY, VOLUME 2 CHAPTER 28 ANTISUBMARINE WARFARE |
| HOME INDEX Chapter 28 Antisubmarine warfare A. General B. QHBa scanning sonar equipment C. Controling the attack D. OKA-1 Sonar resolving equipment E. Depth-determining sonar equipment |
| A. General 28A1. Introduction Antisubmarine warfare (ASW), consists of all and operations directed against enemy submarines, their operating bases, and their supporting activities. Its purpose is to deprive an enemy of the effective use of his submarines. Various of antisubmarine operations are employed in fulfilling this purpose-some offensive in nature, some defensive. The principal ones (i. e., bombing and mining, hunter-killer, escort of convoy, harbor defense, and submarine antisubmarine operations) are discussed elsewhere in this text. In this chapter, only those operations that involve surface antisubmarine (A/S) ships will be considered. The emphasis will be on the equipment actually used to detect, track, and destroy submerged enemy submarines rather than on the tactical aspects of these operations. Because of recent advances in the design of submarines, the newer submarines can remain submerged for long periods of time, and can operate at high speeds while submerged. These advances in submarine performance have stimulated research and development in all fields of ASW, and have made the surface A/S ship increasingly important. It was demonstrated during World War II, and has been confirmed by operational evaluation since that time, that the air-surface, hunter-killer team is one of the most effective units in combating submarines directly. Aircraft are able to search large areas quickly, locate submarines, and attack them with rockets, machine guns, and depth bombs. Aircraft, however, are limited in their staying power and in their ability to maintain contact and attack once the submarine has submerged. It is at this point that the importance of surface A/S ships becomes apparent. With the submarine submerged, these ships can conduct a more effective search than aircraft because they carry sonar equipment. This equipment, to date, has proved to be the most effective means of maintaining contact with and hence controlling the attack on a submerged submarine. 28A2. Weapons The various weapons used against submarines were discussed in chapter 14. Some of these are passive in nature and present no fire control problem. In this category are mines, and-though strictly speaking not weapons-nets and booms. Other weapons effective against surfaced submarines do not present a control problem substantially different from any other surface fire control problem. This is true in the use of guns and torpedoes of surface ships, and very nearly true of all aircraft and submarine weapons when used against submarines. The primary antisubmarine weapons of surface vessels are depth charges and hedgehogs. Rockets and torpedoes are becoming increasingly important as anti-submarine weapons, but a discussion of their application is beyond the scope of this chapter. |
 |
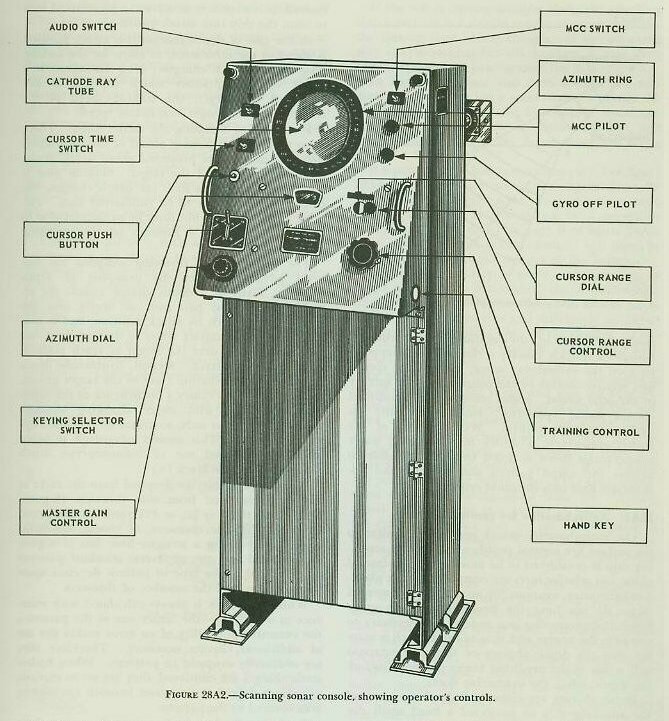
| 28A3. Underwater detection A/S ships use echo-ranging equipment to determine the range and bearing of submerged submarines. Echo-ranging equipment is used to a lesser extent for navigation. In pilot waters, especially when visibility is low, it may be used to locate reefs, other submerged objects, and buoys. Echo-ranging equipment is commonly referred to as sonar, a name derived from its long title: SOund Navigation And Ranging. Sonar equipment makes use of ultrasonic (above audibility) sound waves. When a sound wave, traveling through water, strikes a submerged or partially submerged object, a part of its energy is reflected, and returns to its source as an echo. Sonar equipment projects sound waves into the water, and receives their echoes, by means of a submerged transducer located forward and near the keel of the A/S vessel. The signal-receiving and indicating equipment (the so-called stack or sonar control indicator) is located in a space known as sonar control. The sonar control indicator is shown in figure 28A1. The signal-transmitting equipment, which requires no operator, is usually installed in a space immediately above the transducer. The principal sonars in use during World War II projected a narrow beam of sound into the water, and target indications were returned as audio responses from a speaker or headset. A thorough search was a slow process in that the operator hand-trained the transducer in increments of 2˝° to 5°, according to search doctrine in force. At the close of World War II, the Navy perfected a new type of search sonar known as scanning or azimuth search sonar (fig. 28A2). With each outgoing burst of sound, azimuth sonar searches through 360°, less a narrow sector allowed for the ship’s baffles. In addition, scanning sonar offers both video and audio presentation of target information. |
 |
| 28A4. Limitations of sonar The behavior of sound waves in sea water is a complex study in itself. But an understanding of sonar equipment and its operation requires a general knowledge of the principles of underwater sound. The usefulness of sonar is limited by three factors: I. Variations in the speed of sound. Under standard conditions of temperature (36°F), pressure, and salinity, the speed of sound in sea water is 4,800 feet per second. An increase in water density results in an increase in the speed of sound. An increase in pressure or salinity, or a decrease in temperature, will cause a small increase in density. (Because sea water is nearly incompressible, the effect of pressure is very slight.) Temperature has another, more important effect. Since an increase in temperature causes an increase in molecular activity, it produces a relatively large increase in the speed of sound. Thus the speed of sound will increase when the water temperature rises, even though the density of the water is decreased. |
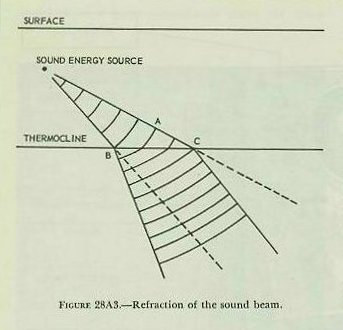 |
| 2. Refraction of the sound beam. Variations in the speed of sound (primarily due to temperature variations), result in refraction (bending) of the sound beam, as shown in figure 28A3. The upper layer of sea water is usually of fairly uniform temperature. At the bottom of this layer is a thermocline-a thin layer with a high thermal gradient (that is, a relatively abrupt change in temperature). The depth of the first thermocline, known as the layer depth, is usually between 50 and 100 feet. Below the thermocline, the temperature is again fairly uniform, but lower than in the surface layer. Figure 28A3 shows how a sound beam, striking a thermocline at any angle other than a right angle, will be refracted downward. The sound wave striking the thermocline at point B slows down, while point A on the same sound wave continues at the original speed until it strikes the thermocline at C. As a result, the wave fronts become more nearly horizontal. Because the sound beam moves in a direction at right angles to the wave fronts, it bends downward. (This effect is very similar to the refraction of light, explained in chapter 16.) Refraction of the sound beam at the thermocline has three important effects: (1) It reduces the range at which submerged objects can be detected. Because of temperature irregularities in the thermo dine, a part of the sound energy that strikes it will be scattered and lost. A part of the returning echo will be lost for the same reason. (2) It causes errors in measurement of target depth. Because the sound beam bends after it leaves the transducer, and the echo beam bends before it returns to the transducer, any measurement based on depression of the sound beam will be in error. (3) It causes errors in measurement of target range. Because the sound beam does not travel in a straight line, the actual range of the target will be less than the measured range. Errors in range measurement are usually much smaller than errors in depth measurement. 3. Echoes. The sonar transducer may receive both single echoes and reverberations (multiple echoes) from marine life, the sea bottom, surface waves, and other irregularities in the water. These echoes and reverberations tend to obscure the echo from the target submarine. Although adverse water conditions may limit the effective range of sonar, and make it difficult to determine the exact bearing of a contact, A/S personnel are trained to get optimum results from their equipment under all conditions. They are trained to predict sound behavior and to apply the results reliably to the antisubmarine problem. Sonarmen quickly classify a contact by its appearance on the cathode-ray scope, the bearing spread and relative motion of the contact, and the quality of the echo sound. Sonar research has established certain sound “patterns,” based principally on underwater temperatures. With the aid of the bathythermograph, a device for measuring water temperatures down to 1,000 feet, it is possible to predict the sound pattern and to introduce appropriate data into the sonar system. 28A5. Antisubmarine fire control problem The antisubmarine attack problem is similar to the surface fire control problem in that the attacking ship is considered to be moving in a horizontal plane and relative rates are computed in this plane. Antisubmarine weapons for attacking a submerged target do not have the flexibility of deck guns. Instead of computing gun orders, it is necessary to compute the course and time-to-fire in such a manner that the depth charges or throwing weapons will arrive at the predicted target position (including depth) when the submarine does. Depth charges are either rolled off the stern of the attacking ship or projected a fixed small distance to the side. Throwing weapons are projected to a position either fixed in relation to the attacking ship or controllable within narrow limits. The fire control problem is largely a tactical problem for this reason. It is not possible to solve this fire control problem in terms of projecting the missile from any location of the ship to the target: instead, it is necessary to solve the problem of how to conn the ship into attack position. In the case of depth charges this attack position is ahead of the submarine, to allow for the sinking time of the depth charges. How far ahead is a major variable quantity which depends on the depth of the target, the sinking speed of the charges, and the target course and speed. For throwing weapons, the tactics differ. There is no necessity for passing ahead of the submarine, since the missiles are projected ahead to fall at the indicated position of the target. Sinking time is less for these missiles than for depth charges, but there is time-of-flight to be considered also. The other variables exist, but must be so calculated as to bring the target to a position off the attacking ship’s bow. The projection of throwing weapons has two great advantages over the dropping of depth charges. First, in a depth charge attack, the attacking ship must pass over or nearly over the submarine to reach its attack position, and it usually loses sonar contact when it does so. It is not necessary to pass over the target to reach position for a throwing attack. Second, hydrostatic depth charges explode whether close to the target or not, and the explosion causes a disturbance of the water which interferes with sonar; throwing weapons explode on contact only, so misses do not interrupt sonar contact. (This second advantage is being offset by increased use of influence-type depth charges such as the Mark 14.) Depth charges may be dropped from the racks at the stern, or fired from side throwers (K-guns) which hurl them as far as 125 yards on the beam. Ships lacking side throwers, of course, can drop charges only along a straight line; but if K-guns are installed any one of several standard patterns may be fired. The type of pattern depends upon the situation and the number of throwers. While the attack is always calculated with reference to one charge-the center one of the pattern- the extensive possibility of an error makes the use of additional charges necessary. Therefore they are ordinarily dropped in patterns. When hydrostatic charges are employed, they are set to explode at various depths in the water beneath the surface area covered by the pattern. Explosives fired under water can do greater damage than a corresponding amount of explosive set off in the air. Nevertheless, modern submarines are so strong that a charge must explode close aboard to have conclusively destructive effect. Explosions beyond the lethal range may indirectly cause destruction of the submarine through leaks in the hull, jamming of the hydroplanes, or other forms of damage. There are two major types of depth charge attack, known as urgent and deliberate. The urgent attack is made to harass the sub and prevent accurate torpedo fire. It consists of a pattern of one or more charges fired immediately, with shallow settings, in an attempt to drive the submarine down and prevent it from firing torpedoes. In an urgent attack, only hydrostatic charges are used. The purpose of a deliberate attack is to destroy the submarine. A pattern is dropped in such a way that the center charge of the pattern will explode against the submarine. The pattern used for a deliberate attack is the standard full pattern of charges fired by the attacking vessel. The chief difficulty with any attack is the time required for the charges to sink. The obsolescent 750-pound depth charge, for example, requires about 40 seconds to reach a depth of 250 feet. During this time the submarine can maneuver without interference. In 40 seconds an 8-knot submarine can travel 180 yards, make a 60° turn, and even change its depth by 60 feet. There is a repetition of the situation encountered in gunfire. Unless the submarine is stationary, the charges can no more be dropped directly over it than a gun can be fired directly at a moving target and score a hit. If the sub is moving straight along the attacking ship’s path, it is a simple matter to compensate for the sinking time of the charges. If the attacking ship is approaching the sub head-on, it may drop the charges before passing over the sub. In both direct bow and stern attacks, the submarine commander has a good chance to evade the attacking ship-and he will, if possible. Sonarmen aboard the sub can hear the attacking ship, and the submarine will rarely move along the ship’s track. |
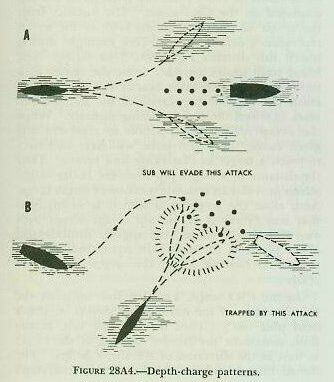 |
| If a pattern were laid as shown in part A of figure 28A4 the sub could evade by turning in either direction. The antisubmarine vessel, therefore, must counter the sub’s evasive tactics by a maneuver similar to the one shown in part B of figure 28A4. Even though the sub tries to turn, it will come in contact with one of the charges of the pattern. When sonar contact is made and direction of target movement is established, the antisubmarine ship is brought to a course which will take it across the bow of the submarine and sufficiently far ahead to allow for the sinking time of the charges. Thus the depth charges will explode at the same time the sub reaches them. In order to steer the proper course, the conning officer must know the range and also the approximate bearing, course, speed, and depth of the sub. Even with all this information, the attack course selected is subject to change at any moment because of the sub’s maneuvers. Unfortunately these maneuvers may go undetected. At very short ranges, 150 yards or less, the return echo of the sonar equipment cannot be distinguished from the outgoing signal. Also, contact may be lost at longer ranges; for example, contact may be lost at 700 yards if the sub is deep enough. Thus the sub’s position will often not be known exactly in the last stages of the attack. To reduce both the length of this “silent period” and the chances of evasion by the sub, the surface vessel generally attacks at as high a speed as possible. (The conning officer must also make certain that his ship will clear the explosions of the stern-dropped charges.) The maximum attack speed, however, is limited. At high speeds the water noises caused by the sonar transducer traveling through the water may obscure the sound echoes from the sub. |
| 28A6. Throwing weapons During an attack with throwing weapons, the sonar operator must hold contact with the sub and furnish the conning officer with continuous ranges and bearings. The conning officer then keeps the ship headed toward the estimated future target position and comes in for the attack. Because the charges have a fixed range, the pattern must be fired when the ship reaches the correct firing range. The correct firing range depends upon many factors, most of which are calculated in advance and set into the range recorder, attack plotter, and OKA equipments. 28A7. Conclusion Other types of weapons and other forms of attack are under development, but their security classification is such that they cannot be considered in this text. |