| NAVAL ORDNANCE AND GUNNERY VOLUME 2, FIRE CONTROL CHAPTER 29 MISSILE CONTROL AND GUIDANCE SYSTEMS |
| HOME INDEX Chapter 29 Missile control and guidance systems A. Introduction B. Control systems C. Basic guidance systems |
| C. Basic Guidance Systems 29C1. General As has been previously stated, every guidance system consists of an attitude control system and some sort of a path control system. The name of the path control system depends upon the unique manner in which path control is accomplished. Since nearly all missiles use the same type of attitude control system, it is common practice to refer to the guidance system by the name of the path control system. The following is a list of the eight basic guidance systems: Pre-set Radio navigation Terrestrial reference Command Inertial Beam rider Celestial navigation Homing The pre-set, terrestrial reference, inertial, and celestial navigation systems are often referred to as self-contained guidance systems. In these systems, the missile is made to fly a predetermined path calculated prior to launching. Devices wholly within the missile cause the missile to remain on the correct flight path to the target. Such systems provide an excellent means for guiding surface-to-surface missiles. The principal advantage is that there are no existing countermeasures. The principal disadvantage is that accuracy is generally poor due to instrument errors; consequently these systems, unless combined with another system, are limited to area targets. The radio navigation, command, beam rider, and homing systems all depend on signals from an external source to keep the missile continuously on the correct flight path. The principal advantage of these systems is greater accuracy than the self-contained systems. The principal disadvantage is high susceptibility to countermeasures. 29C2. Pre-set guidance system A pre-set guidance system is one in which a predetermined path is set into the missile prior to launching, and cannot be adjusted after launching. The principal device used in the pre-set missile is a programmer. The programmer is a set of switches and an electric or other type of time motor which operates to close the switches at the proper time after launching, to cause components in the missile to perform certain functions as the missile proceeds along its flight path. The Germans used the pre-set system in the V-2 rocket employed against England during World War II. Prior to launching, the V-2 was oriented with respect to the target. Four seconds after launching, the programmer caused a false pitch signal to be sent to the pitch attitude control system, causing the missile to pitch to a predetermined angle toward the target. The missile remained at this attitude until the propulsion system accelerated it to a velocity sufficient to carry the missile to the target. At this point, the programmer caused a signal to be sent to a fuel cut-off valve shutting off the fuel to the rocket motor. The V-2 then followed a free-flight ballistic trajectory to the target similar to the trajectory followed by a projectile fired from a conventional gun. The guidance range obtainable with the current pre-set system is about 200 miles. 29C3. Terrestrial reference guidance system A terrestrial reference guidance system is one in which the predetermined path can be adjusted after launching by devices within the missile which react to some phenomenon of the earth. One of the best illustrations of this system is the German buzz bomb or V-1. The missile course was monitored by a magnetic compass placed in the nose. If the missile turned to the right or left, the compass created an error signal which directed the servo to bring it back on course by correct movement of the control vanes. The V-1 also utilized another phenomenon of the earth-atmospheric air density. By use of a barometer (altimeter), it compared the air density against a pre-set air density. If a difference existed, the device initiated the required error signal to move the missile to the correct altitude. Before firing, the bearing of the target was set into the missile by orienting the compass; the range was set on an air log similar to a speedometer connected to a small propeller; and the altimeter or air-density measuring device was set to maintain the proper altitude. Control of the V-1 employed the earth’s magnetic field and the atmospheric air density. Although not practical at present because of the lack of exact knowledge, other references which might be used in the future are cosmic rays, gravitational field, and configuration of the earth’s surface. As with the pre-set system, the guidance range currently obtainable with the terrestrial reference system is about 200 miles. 29C4. Inertial guidance system An inertial guidance system is a system designed for a predetermined path in which the path of the missile is adjusted after launching by devices wholly within the missile, making use of the principle of Newton’s second law of motion (F=Ma), and independent of any outside information. In the simplest system, the missile contains devices called accelerometers to detect and measure accelerations in two directions. Acceleration errors detected and measured by the accelerometers are doubly integrated to obtain the distances the missile is off its predetermined flight path. A missile would require one accelerometer for vertical path control and another for lateral path control. If, at launching, the missile is pointed at the target, the missile must move so as to keep the right-left distance and up-down distance zero. Meanwhile a range device measures the distance traveled by the missile along its flight path. When a pre-set range is reached, the missile dives into the target. Based on present-day techniques in design and construction, it is expected that a guidance range of 12,500 miles can be achieved by a missile employing the inertial guidance system. 29C5. Celestial navigation guidance system A celestial navigation guidance system is a system designed for a predetermined path in which the path of the missile is adjusted by the use of continuous celestial navigation. The system is based on the known apparent positions of celestial bodies with respect to points on the surface of the earth at a given time. Such a system is highly desirable for long-range missiles since its accuracy is independent of range. In its application to guided missiles, we must provide in the missile a means of doing the same thing a navigator does when he takes celestial sights. The missile must be provided with a horizontal or vertical reference to the earth, automatic star-tracking telescopes to determine star-elevation angles with respect to the reference, a time base, and navigational star tables mechanically or electrically recorded. A computer continuously compares star observations with the time base and navigational tables to determine the missile’s present position. The present position is then compared with the predetermined position, and the proper signals computed to steer the missile correctly toward the target. As with the inertial guidance system, it is expected that the guidance range of a missile employing this guidance system will be 12,500 miles. 29C6. Radio navigation guidance system A radio navigation guidance system is a system designed for a predetermined path in which the path of the missile is adjusted by devices in the missile that are controlled by external radio signals. The simplest method is one in which the missile is able, by means of a directional antenna, to maintain predetermined bearings with respect to two radio transmitters. The most highly developed method is the hyperbolic system. It is based on the measurement by a receiver in the missile of the time delay of signals from two synchronized transmitters in a known location. If the time difference is kept constant, a hyperbolic course will result. Altitude is generally determined by an altimeter. Range may be determined by the addition of a third transmitting station. LORAN and SHORAN are examples of radio navigation systems. The guidance range expected with this system is about 500 miles. 29C7. Command guidance system A command guidance system is one in which the path of the missile can be changed after launching by directing signals from some agency outside the missile. The control station obtains information of the relative positions of the target and the missile so as to direct the missile to intercept or attack the target along some trajectory. Many variations of this method may be used to guide a missile. One of the simplest methods is the system used to guide a drone plane in to a target. A human operator observes the drone and target and sends commands to the drone over a radio command link. These commands cause the servos of the attitude control system to properly position the drone elevators and rudders to execute the desired maneuver. In a more complex, advanced surface-to-air system, the human operator is replaced by two radars and a computer. One radar is used to track the target and the other to track the missile. The computer continuously compares the present position of the missile with that of the target and determines new missile flight paths based on errors present in missile-target relative positions. Radio commands which cause the missile to fly the new flight path are sent to the missile by the missile-tracking radar beam. Guidance ranges possible with this type of system will depend upon the ability of the radio or radar transmitters to transmit an effective signal to the missile. With current equipment, guidance ranges possible for a missile-employing command guidance are about 75 to 100 miles. |
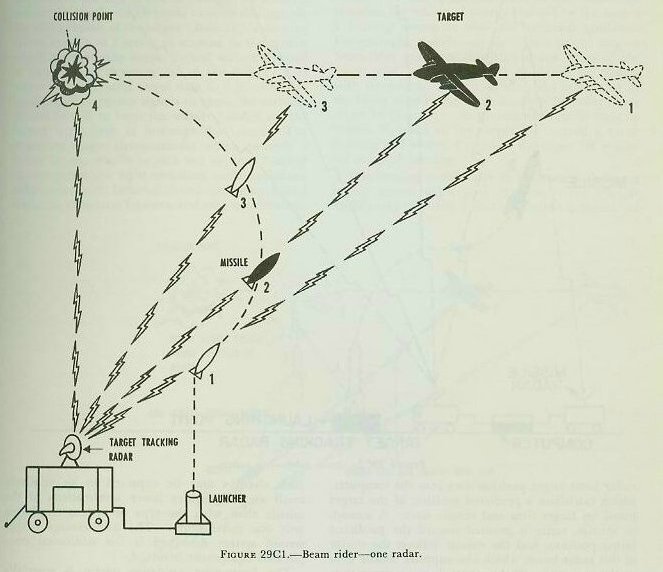 |
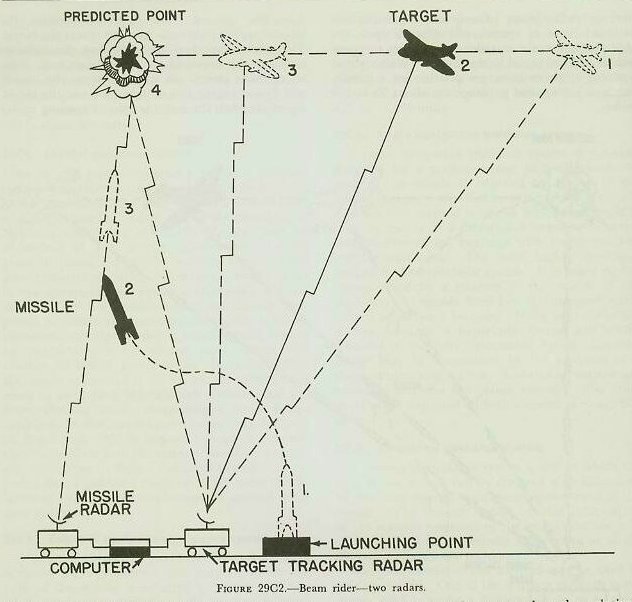
| 29C8. Beam-rider guidance system A beam-rider guidance system is one in which the direction of the missile can be changed after launching by devices within the missile, which cause it to seek out the center of the beam. Radars produce the most promising types of beams. In addition to radar, other phenomena such as light and heat might be used for this purpose. In one type of radar beam-rider system, the target-tracking radar continuously tracks the target. The missile, launched into the beam, continuously seeks out the center of the radar beam until it intercepts the target. In such a system, the missile will fly a changing line-of-sight course to the target, especially when the target is flying a crossing course as illustrated in figure 29C1. Because the radar beam must continuously be directed at and moved with the target, such a flight path possesses the disadvantage of requiring extremely high traverse accelerations of the missile. The disadvantage of the one-radar beam-rider system is overcome by another system employing two radars and a computer. The target-tracking radar feeds target position data into the computer, which calculates a predicted position of the target based on target data and missile data. A second, or missile, radar is pointed toward the predicted target position, and the missile follows the center of this radar beam, which also supplies missile data to the computer. If the target does not maneuver, and if the calculation of the predicted point is correct, the missile radar beam does not need to be moved from the predicted point; then the missile will fly a straight-line course toward collision with the target as indicated in figure 29C2. If the target maneuvers, or if the computation of the predicted point is in error, the predicted point, and hence the direction of the missile radar beam, will change. Such changes may be expected to be relatively small and to require lower accelerations of the missile than with the type of system employing only one radar beam. The disadvantage of the second system described is the additional complicated equipment involved. |
 |
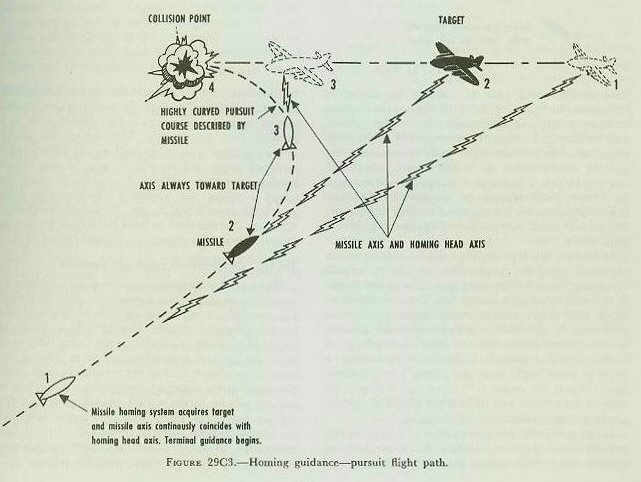
| The beam-rider guidance system is especially adaptable for use against incoming air targets, and thus can be expected to be used for AA defense of ships at sea and of cities on land. A number of missiles can be launched into the beam at once, and if the targets aren’t too widely separated, the beam can be shifted to a new target with missiles already in the beam. Accuracy decreases with an increase in range, however, due to the spreading of the radar beam at the longer ranges. As with the command guidance system, possible guidance ranges with present-day radar beam-rider systems are from 75 to 100 miles. 29C9. Homing guidance system A homing guidance system is one in which the direction of the missile can be changed by a device within the missile which reacts to some distinguishing characteristic of the target. Basically, a homing system consists of a seeker or scanner in the missile which automatically keeps “locked on” or pointed at some special characteristic of the target. The seeker must also send target data to a missile computer which computes signals to cause the attitude control system to keep the missile headed on the correct flight path to intercept the target. The important target characteristics which provide a means for the missile to pick out or keep “locked on” the target are: light emissions, radio emissions, radar reflectivity, infrared (heat) emissions, sound emissions, capacitive features, and magnetic features. To date, the best means of target detection has been through infrared (heat) emissions and radar reflections. These systems are sufficiently accurate that collision may be expected. In homing systems, the missile must carry all of the equipment and, because of the weight factor, will be limited to short-range operation. Since accuracy of this system increases as the missile approaches the source of energy emitted by the target, a homing system is ideal for terminal guidance. For example, a surface-to-air missile might employ beam-rider guidance to within a few miles of the target and infrared homing guidance to impact with the target. In this manner, the inaccuracy of the beam rider at the outer limits of its radar range might be overcome. At present, the missile must be within 30 miles of the target for successful radar homing and within 5 miles of the target for successful infrared homing. The homing missile may be designed to follow a highly curved flight path (known as the pursuit flight path) resulting from the missile’s longitudinal axis always being pointed toward the target, as illustrated in figure 29C3. This flight path requires extremely high accelerations from the missile, particularly just before it intercepts the target; consequently, the pursuit flight path is most effective against slow-moving or fixed targets. For fast-moving targets, a lead-type flight path, as illustrated in figure 29C4, might be employed. Whereas lower accelerations are required by this flight path, the missile must carry more complicated guidance equipment. |
 |
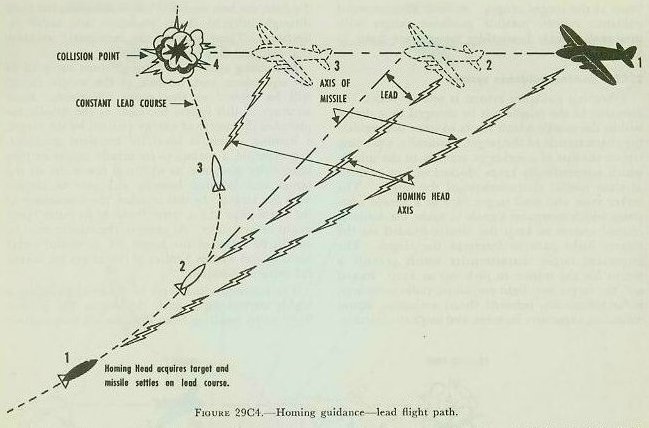 |
| In the pursuit-type flight path, the missile seeker mounted along the longitudinal axis of the missile “locks on” some distinguishing feature of the target. If the missile’s longitudinal axis is not pointed toward the target continuously, error signals are produced by the seeker, which cause the attitude control system to change the missile’s heading. A lead-type flight path will result if the seeker is offset at some angle from the missile’s longitudinal axis. When the seeker is “locked on” a target, the nose of the missile will be pointed ahead of the target by the amount of the offset angle. Homing systems are generally classified as active, semiactive, or passive systems. In active homing systems, the missile carries the equipment required to illuminate the target, and the system is independent of an external agent. In a semiactive homing system, some agency outside the missile, such as a ground unit or aircraft, illuminates the target. Thus a ground unit or aircraft would keep a radar beam on target and the missile radar receiver would receive the target echoes. In passive homing, the target supplies the necessary illumination upon which the missile will home. A missile designed to home on the infrared or heat radiations from a jet aircraft, or a ship at sea, is a passive homer. 29C10. Combination guidance systems Many of the foregoing guidance systems may be combined to utilize the advantages of each system. For example, a surface-to-air missile might utilize pre-set guidance during the launching phase to orient the missile in a radar beam, beam-rider guidance during the midcourse guidance phase, and homing guidance during the terminal phase when the beam-rider accuracy decreases. A surface-to-surface missile might utilize pre-set guidance during the launching phase to orient the missile with the target, celestial navigation during the midcourse long-range guidance phase, and homing guidance to enable the missile to pinpoint the target. |