Increased aircraft speeds in World War II made necessary the development of fire control systems which could further reduce the time required for solution of the antiaircraft fire control problem. This step was vitally necessary for the control of machine guns, for which the solution time is limited by the relatively short effective range of the weapons. Inasmuch as an individual system is provided to control each mount, the fire control system had to be limited in size and weight. Furthermore, since the greatest danger to the ship was from incoming targets at close ranges, many of the factors computed by such a fire control system as the Mark 37 could safely be ignored. The result was the development of a family of lead-computing or relative-rate systems which differ from the Mark 37 fire control system in that they measure the rates of change of bearing and the elevation directly as angular quantities, and measure these quantities simply by tracking the target. Although originally used for machine guns, systems of this type have now been developed to control guns as large as 6-inch at close and intermediate ranges.
Some relative-rate systems offset the line of sight from the fore-and-aft axis of the sight case by the amount of computed lead angle, so that the sight case itself is aligned with the gun bore axis. These systems are known as disturbed-line-of-sight systems. Most lead-computing sights are of this type. Other systems, however, measure the lead angles and transmit them to a computer which makes up the gun orders, while leaving the sight telescope, fixed in relation to the sight case, in the line of sight. These are known as undisturbed-line-of-sight systems.
Gun Sight Mark 15 and Gun Fire Control System Mark 63, which are examples of disturbed-line-of-sight systems, are described in some detail in this chapter.
26A2. Lead angles
The hunter who shoots ducks on the wing knows that he must lead the duck by a sufficient angle to compensate for the duck’s travel while the load of shot is in the air. A moment’s reflection will show that if the duck is climbing, the hunter must lead in elevation; if it is flying across the hunter’s line of sight, there must be a lead angle across the line of sight, in traverse. The actual lead angle is the resultant of these two components.
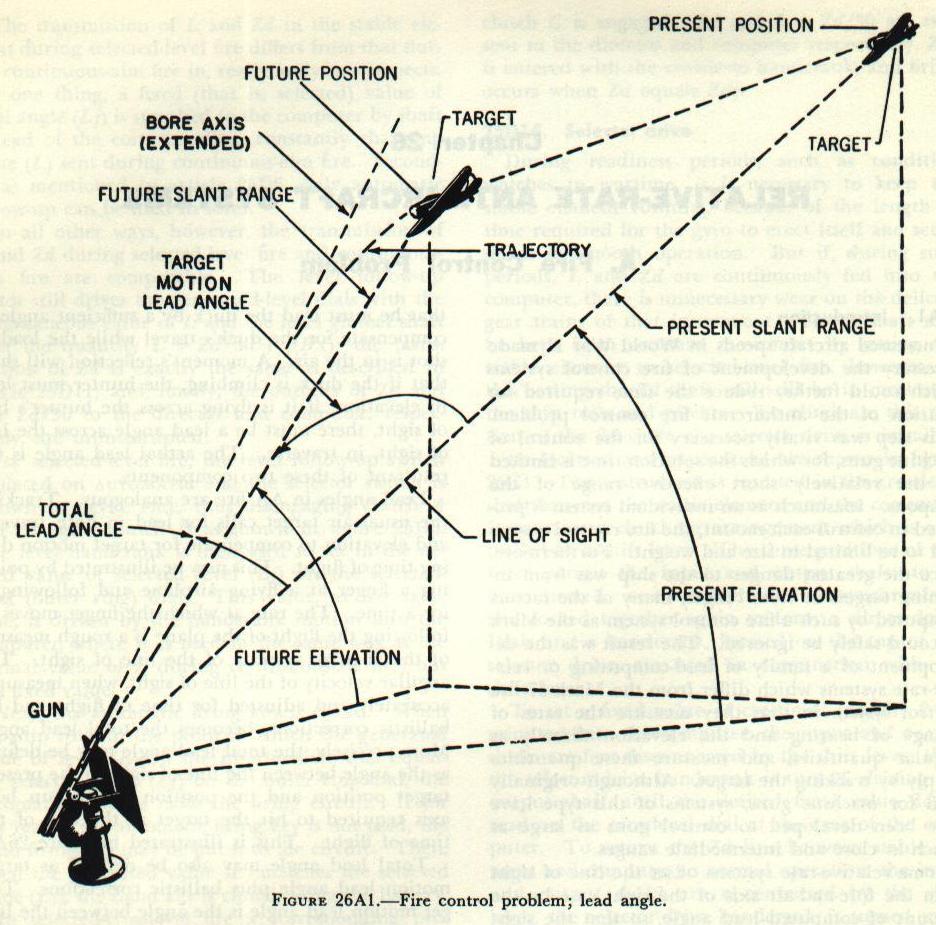
Lead angles in AA fire are analogous. Tracking the usual air target calls for lead in both traverse and elevation to compensate for target motion during time of flight. This may be illustrated by pointing a finger at a flying airplane and following it for a time. The rate at which the finger moves in following the flight of the plane is a rough measure of the angular velocity of the line of sight. The angular velocity of the line of sight, when measured accurately and adjusted for time of flight and for ballistic corrections, becomes the total lead angle. More precisely, the total lead angle may be defined as the angle between the line of sight to the present target position and the position of the gun bore axis required to hit the target at the end of the time of flight. This is illustrated in figure 26A1.
Total lead angle may also be defined as target motion lead angle plus ballistic corrections. Target motion lead angle is the angle between the line of sight to the targets present position and the line from gun to target at the end of the time of flight. Target motion lead angle is ordinarily made up of an elevation lead angle, measured in a plane per. perpendicular to the deck, and a traverse lead angle, measured in the traverse plane. The traverse plane is the slant plane containing the gun or sight trunnion axis and the present position of the target. Although the usage is not strictly accurate, the term train, instead of traverse, is usually used for the sake of convenience.
26A3.Superelevation
As shown in figure 26A1, the gun bore cannot be pointed directly at the future target position, because the projectile follows a curved trajectory. A part of this curvature is caused by the downward pull of gravity on the projectile. The correction for this effect is called superelevation. As gravity always acts in a vertical plane, superelevation must be computed in this plane. Superelevation varies with future target range, initial projectile velocity, and future target elevation. Since the force of gravity acts continually on the projectile, the longer the time the projectile is in flight, the greater will be the vertical deviation of the projectile from the gun bore axis. From this it follows that superelevation must vary directly with range, since the time of flight is greater for a greater range. It is also apparent that as initial velocity decreases, superelevation must increase, since a longer time is required for the projectile to reach a given range.
The effect of gravity on the projectile is to pull it down vertically. We are for the time being concerned only with the deviation of the projectile from the line of the gun bore axis, however, and so need consider only that component of gravity which is perpendicular to the gun bore axis. It is readily apparent that this component decreases as target elevation increases, and that for a given range, superelevation varies directly as the cosine of the elevation angle of the gun above the horizontal. The effects of range and elevation on super-elevation are illustrated by figure 24B6.
26A4. Drift
A second element of the trajectory’s curvature is drift, which is a projectile’s tendency to move to the right of the extended gun bore axis. Gun barrel rifling causes the projectile to rotate at high speed, thus imparting gyroscopic properties to it These properties give the projectile a tendency to maintain its axis parallel to the gun bore axis throughout its flight. Since gravity pulls the projectile downward from the line of the gun bore axis, its nose tends to remain elevated above a line tangent to its trajectory. Air resistance against the lower part of the nose of the projectile produces an upward force on the nose. The combination of projectile inertia and air resistance produces a torque which causes the projectile to precess to the right. The effects of drift vary directly with the angle made by the projectile’s centerline with the trajectory and with the projectile’s time of flight. Since a trajectory departs farther from the line of the gun bore axis at low gun elevations than at high elevations (due to superelevation), drift varies inversely with gun elevation or directly with the cosine of gun elevation. Also, since a longer range requires a longer time of flight and greater super-elevation, the effects of drift vary directly with range. This means that for very short ranges drift is small, and it may safely be ignored in lead-computing sights which are designed for firing only at these short ranges.
26A5. Other ballistic corrections
The numerous other factors which affect the trajectory, such as wind, air density variations, and the like, are present in the short-range antiaircraft fire control problem, but in many cases they may safely be ignored, just as drift is ignored in the simpler sights. In unusual cases, where these uncorrected factors cause large errors, they may be corrected by spotting with the assistance of tracers. More complex relative-rate sights and systems, designed for firing at longer ranges, do make corrections for some of these factors.