
INDEX Back to Main Fire Control Page
A. Fire Control Problem Chapter 26B
B. Basic elements of lead-computing sights (This page)
C. Gun sight Mark 15 Chapter 26C
D. Gun Fire Control System Mark 63 Chapter 26D
E. Gun Fire Control System Mark 56 Chapter 26E
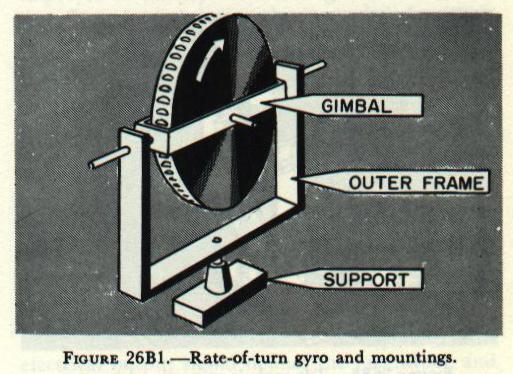
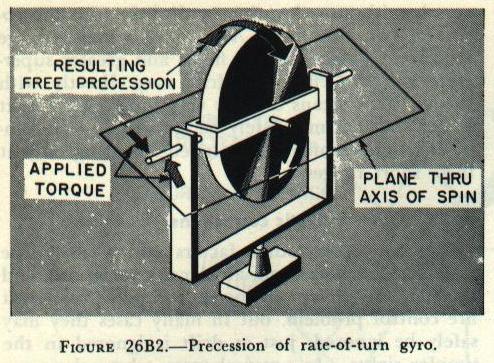
In solving the fire control problem for short-range antiaircraft fire, the various lead-computing sights and relative-rate systems make use of a number of elements which are not used in linear-rate systems such as the Mark 37. Three of these elements will be described in this section: the rate-of-turn gyro, the torque motor, and the pick-off transformer.
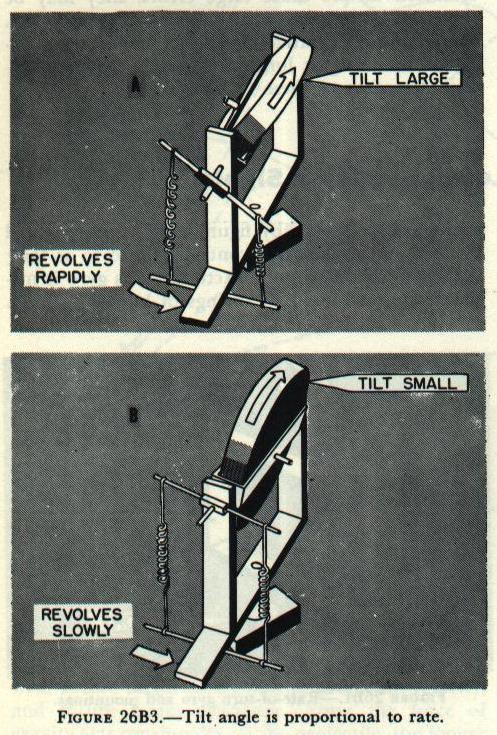
One method by which this might be accomplished is illustrated in figure 26B3. Although the method shown is somewhat simpler than those employed in actual sights, it serves to demonstrate the principle. As soon as the wheel starts to tilt, one spring is extended and the other compressed. The rotor will continue to tilt until the restraining torque exerted by the springs is equal to the precessional torque of the gyro about the output axis. This precessional torque is directly proportional to the rate of turn of the gimbal frame about the input axis. If the gimbal frame is turned rapidly, as in figure 26B3 (A), the gyro rotor will tilt sharply before the two torques are balanced, as in figure 26B3 (A, B). When the gimbal frame is turned more slowly, the rotor tilts to a lesser angle. Since the restraining springs resist the precession of the gyro, the amount of rotor tilt is inversely proportional to the stiffness of the springs. The tilt about the output axis, then, depends upon this relationship:
Output angle = (K) X (Applied rate of turn) divided by (Restraining spring stiffness)
where K is a constant depending on the stability of the particular gyro.
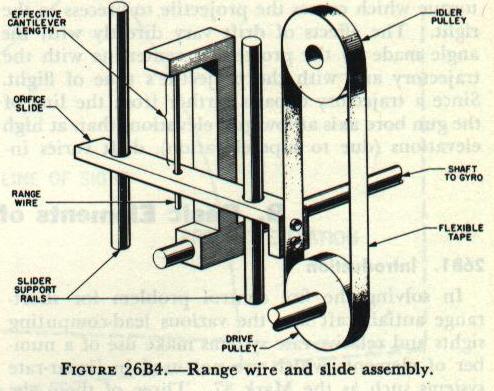
Gun Sight Mark 15, which will be described in this chapter, uses two rate-of-turn gyros having a cantilever type restraining spring, as shown in figure 26B4. The rate-of-turn gyros are used to generate target motion lead angles. The required target motion lead angle is the product of the angular velocity of the line of sight, and the time of flight. The gyros are so mounted within the sight case that when the operator is tracking smoothly, the gimbal frame of one gyro turns about its input axis at a rate equal to the angular velocity of the line of sight in elevation, and the gimbal frame of the other gyro turns about its input axis at a rate equal to the angular velocity of the line of sight in traverse. The two gyros are called the elevation gyro and the train gyro, respectively. The stiffness of the restraining springs is adjustable by moving the orifice slide, as may be seen in figure 26B4. The stiffness of these is adjusted in accordance with the time of flight. Since the lead angle must be greater for a longer time of flight, the restraining spring stiffness is made less for a longer time of flight.
Consequently, the rotation of the output shaft is directly proportional to the required lead angle.
It should be stated at this point that Gun Sight Mark 15 is designed for use against high-speed, short-range targets, and is an accurate and dependable system only when so used. It is not suitable for use against targets at long range, for the reason that in such cases the angular bearing rate is so small that tracking cannot set up a dependable solution.
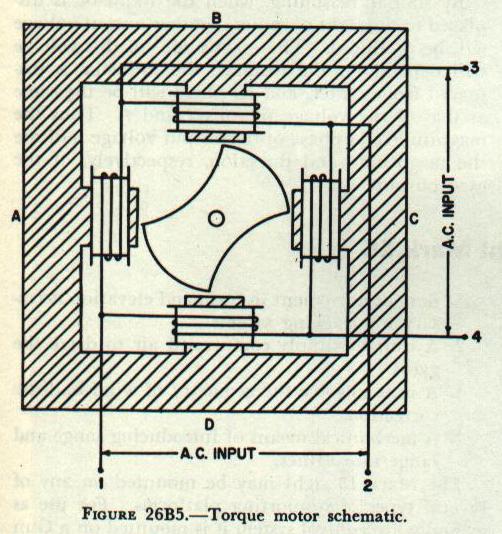
A torque motor is a motor with a rotor shaft that exerts deflecting torques, and is illustrated schematically in figure 26B5. The magnitude and direction of the output torque depend upon the magnitudes and phase relationship of two a-c input potentials impressed upon the motor stator coils.
A torque motor consists of a soft iron rotor mounted within a laminated soft iron stator frame, and four coils mounted 90 degrees apart on the stator. The stator coils are connected to form a closed bridge circuit.
Operation of a torque motor may be understood by the analysis of the currents flowing through the various stator coils and the magnetic fields produced by these currents. If the phase relationship of the two input potentials is such that at a particular instant terminals 1 and 3 are negative and terminals 2 and 4 are positive, the currents in coils B and D will reinforce each other. At the same time, the currents in coils A and C will be opposing each other. Consequently, the magnetic field between poles B and D will be stronger than that between poles A and C. Since the rotor tends to align itself with the magnetic lines of force of the stronger field, it will exert a counterclockwise torque. It should be noted that the rotor is restrained to only a few degrees of rotation, so that it does not completely align itself with poles B and D. but merely exerts a torque in that direction.
Suppose now that the phase of one of the input potentials is reversed, so that at a particular instant terminals 1 and 4 will be negative and terminals 2 and 3 will be positive. In this case the currents in coils B and D will oppose each other, while the currents in coils A and C will reinforce each other. The rotor will now tend to align itself with poles A and C, producing a clockwise torque.
As a third example, let us assume that no voltage is impressed between terminals 3 and 4. Now the currents in all coils will be equal, the magnetic fields will be equal, and no output torque will result.
The output torque in each instance is directly proportional to the product of the magnitudes of the two input potentials, and the direction of the output torque is dependent upon the phase relationship of the two inputs.
In some lead-computing sights, torque motors are employed to modify the lead angles to correct for the effect of wind during the time of flight. This is accomplished by mounting the torque motor so that its rotor is attached to the output shaft of the rate-of-turn gyro. The output torque of the torque motor then either aids or opposes the precessional torque of the gyro, thus modifying the generated lead angles. In this case the input potentials represent wind rates.

A pick-off transformer is a wire-wound inductive electrical element which is used to convert the mechanical angular displacement of a gyro output shaft into an electrical signal for transmission to other components of a relative-rate system. The electrical output signal defines the magnitude and direction of the gyro shaft output. A pick-off transformer is shown schematically in figure 26B6.
The train and elevation pick-off transformers used in Gun Sight Mark 15 are identical. Each consists of a frame, an inductor, and six coils. Both the frame and the inductor are of laminated, high-permeability steel. Four pole pieces are mounted with the rectangular frame. Two primary coils are wound on the sides of the frame, and four secondary coils are wound on the four pole pieces. The inductor, mounted on an arm attached to the gyro output shaft, moves in the space between the secondary coils.
The pick-off transformer primary windings are connected in series across a 10-volt a-c supply; the secondary coils are connected in series with the output leads. The coils are wound so that the voltages induced in coils 1 and 2 are opposite in phase to those induced in coils 3 and 4. When the inductor is centered, the voltage induced in coils 1 and 2 is equal in magnitude and opposite in phase to that induced in coils 3 and 4. The result is zero Output voltage.
When the inductor is moved to the left by rotation of the gyro output shaft, the reluctance (magnetic resistance) of the magnetic path between poles 1 and 2 is less than that of the path between poles 3 and 4. Because a lower reluctance allows a greater magnetic flux, the voltage induced in coils 1 and 2 is greater than that induced in coils 3 and 4. This voltage difference becomes greater as the inductor is moved farther from its center position. The output voltage is now equal to the difference between the voltage induced in coils 1 and 2 and the voltage induced in coils 3 and 4, and has the same phase as the voltage in coils 1 and 2.
By similar reasoning, when the inductor is displaced to the right of center, another output voltage will be produced. The magnitude of this voltage will depend on the distance the inductor is displaced from center, and its phase will be the same as that of the voltage in coils 3 and 4. Thus the magnitude and phase of the output voltage indicate the magnitude and direction, respectively, of the gyro output.