
INDEX Back to Main Fire Control Page
A. Fire Control Problem Chapter 26B
B. Basic elements of lead-computing sightsD. Gun Fire Control System Mark 63 Chapter 26D (This page)
E. Gun Fire Control System Mark 56 Chapter 26E
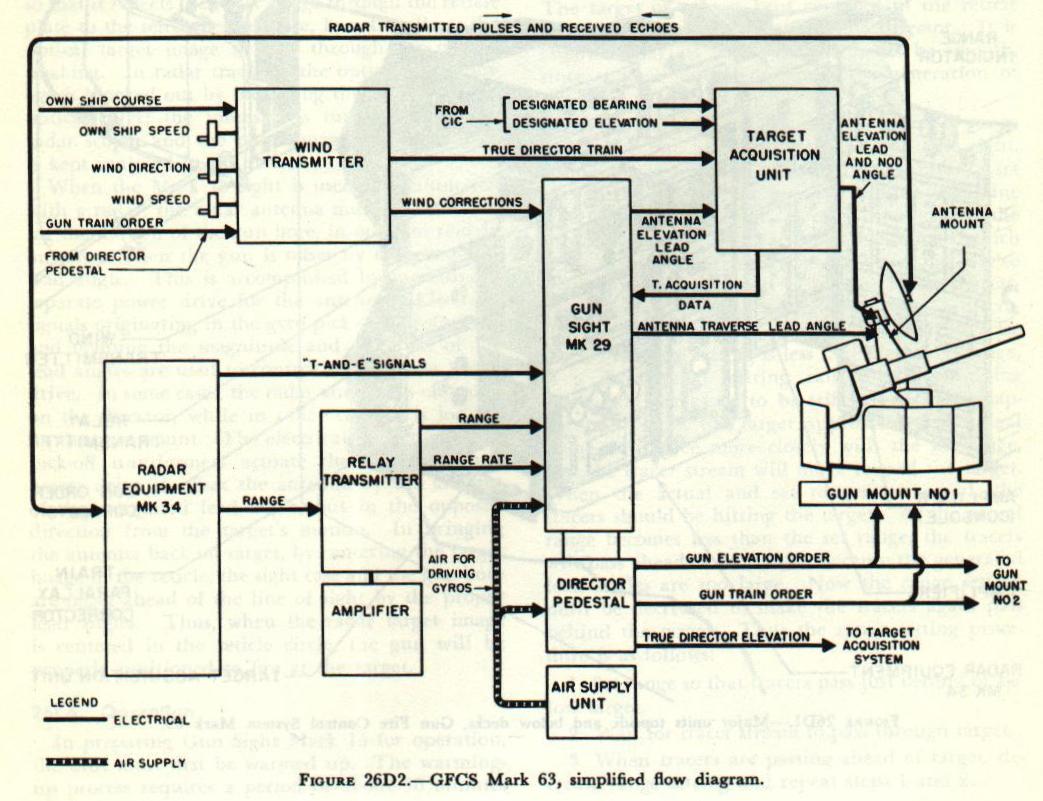 The major units included in the system are:
The major units included in the system are: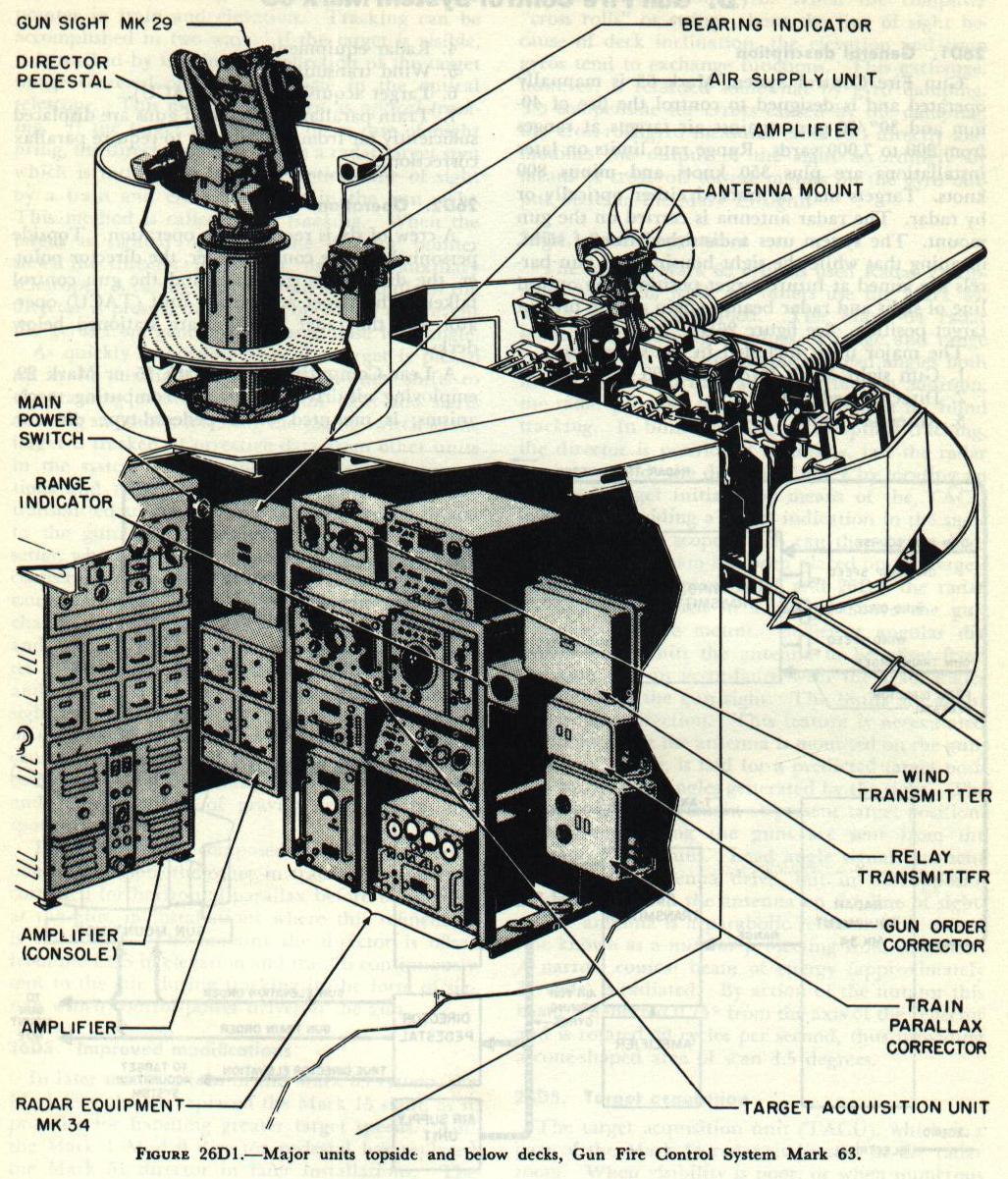
 Sufficient angular displacement permits the antenna to be offset from the bore axis in accordance with the lead angles generated by the gun sight.
Sufficient angular displacement permits the antenna to be offset from the bore axis in accordance with the lead angles generated by the gun sight. 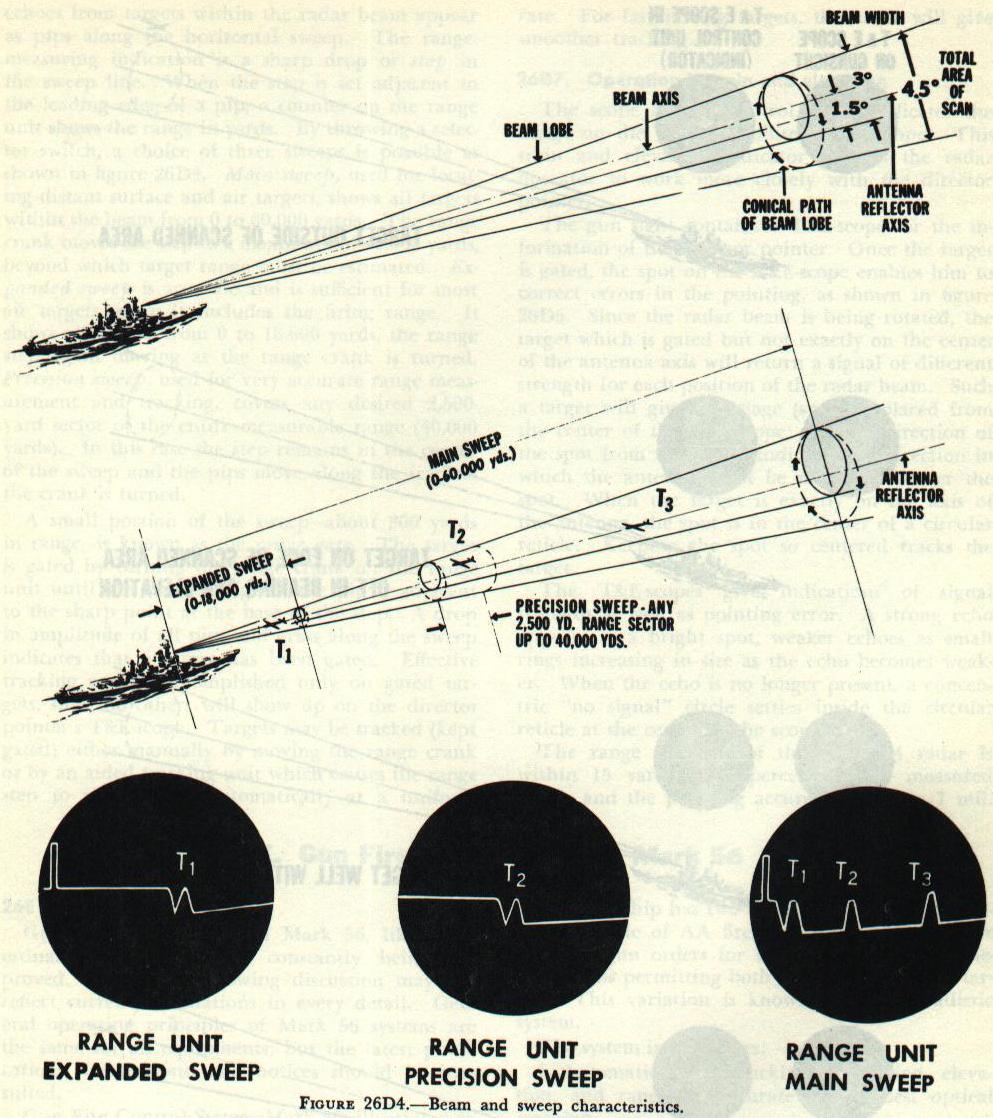 Main sweep, used for locating distant surface and air targets, shows all targets within the beam from 0 to 60,000 yards.
Main sweep, used for locating distant surface and air targets, shows all targets within the beam from 0 to 60,000 yards. 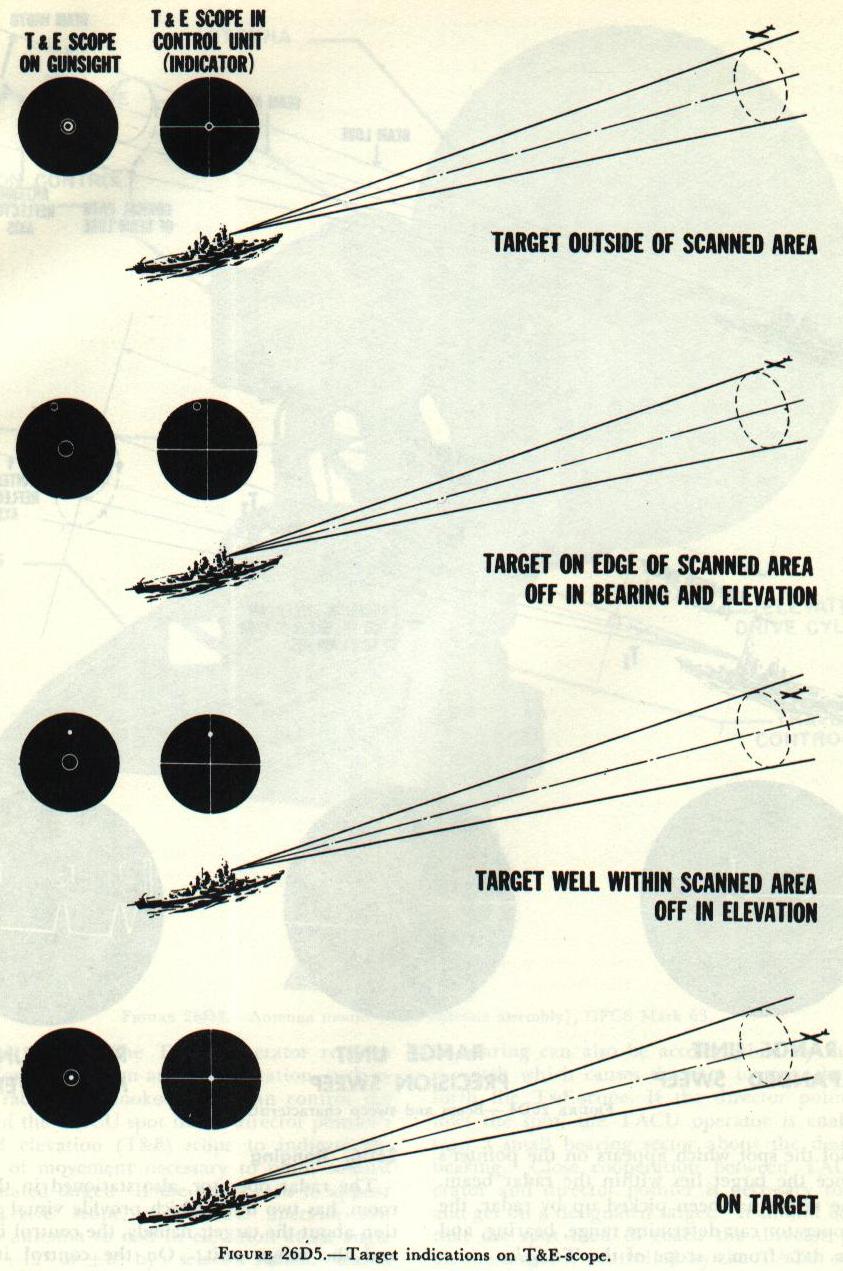 Since the radar beam is being rotated, the target which is gated but not exactly on the center of the antenna axis will return a signal of different strength for each position of the radar beam.
Since the radar beam is being rotated, the target which is gated but not exactly on the center of the antenna axis will return a signal of different strength for each position of the radar beam. A. Fire Control Problem
B. Basic elements of lead-computing sights
C. Gun sight Mark 15
D. Gun Fire Control System Mark 63
E. Gun Fire Control System Mark 56, Page 1
E. Gun Fire Control System Mark 56, Page 2
E. Gun Fire Control System Mark 56, Page 3
E. Gun Fire Control System Mark 56, Page 4
E. Gun Fire Control System Mark 56, Page 5