
INDEX Back to Main Fire Control Page
A. Fire Control Problem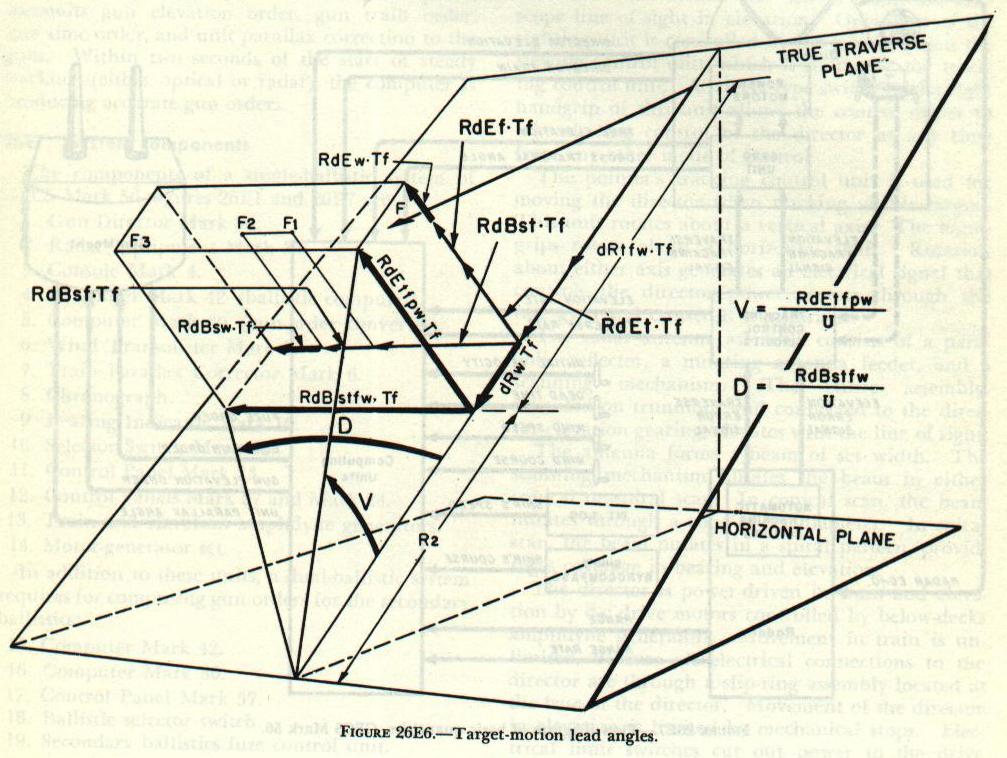 The lead angles V and D, shown in figure 26E6, are in the true elevation and true traverse planes.
The lead angles V and D, shown in figure 26E6, are in the true elevation and true traverse planes.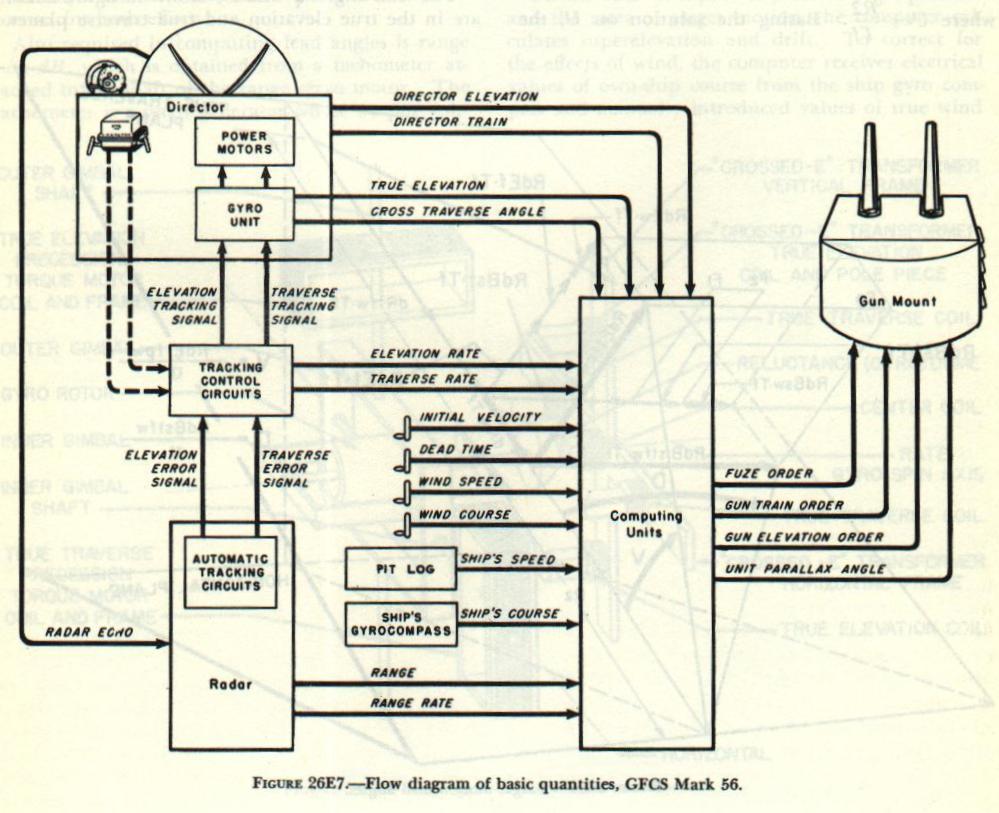 Figure 26E7 shows the flow of basic quantities in the system when using automatic radar tracking, which is the usual method of operation. The radar equipment in the radar room receives target echoes from the antenna and transmits traverse and elevation error signals to the gyro unit as tracking signals and to the computer as rates of target motion. By resetting the control switches, signals from the optical tracking control unit in the director may be selected in place of radar error signals. The radar equipment transmits range and range rate to the computer during both radar and optical tracking.
Figure 26E7 shows the flow of basic quantities in the system when using automatic radar tracking, which is the usual method of operation. The radar equipment in the radar room receives target echoes from the antenna and transmits traverse and elevation error signals to the gyro unit as tracking signals and to the computer as rates of target motion. By resetting the control switches, signals from the optical tracking control unit in the director may be selected in place of radar error signals. The radar equipment transmits range and range rate to the computer during both radar and optical tracking.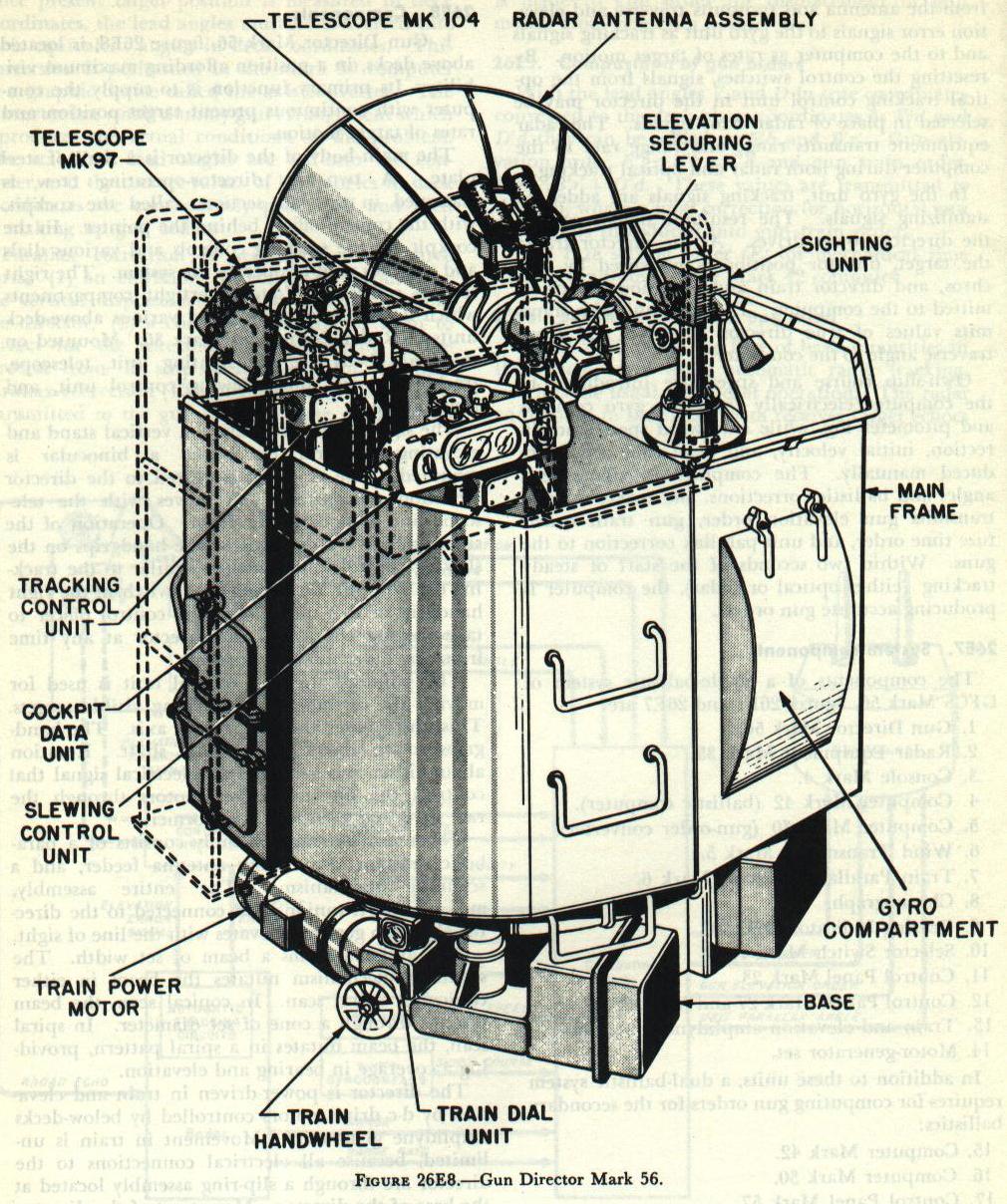 1. Gun Director Mark 56, figure 26E8, is located above decks, in a position affording maximum visibility. Its primary function is to supply the computer with continuous present target position and rates of target motion.
1. Gun Director Mark 56, figure 26E8, is located above decks, in a position affording maximum visibility. Its primary function is to supply the computer with continuous present target position and rates of target motion.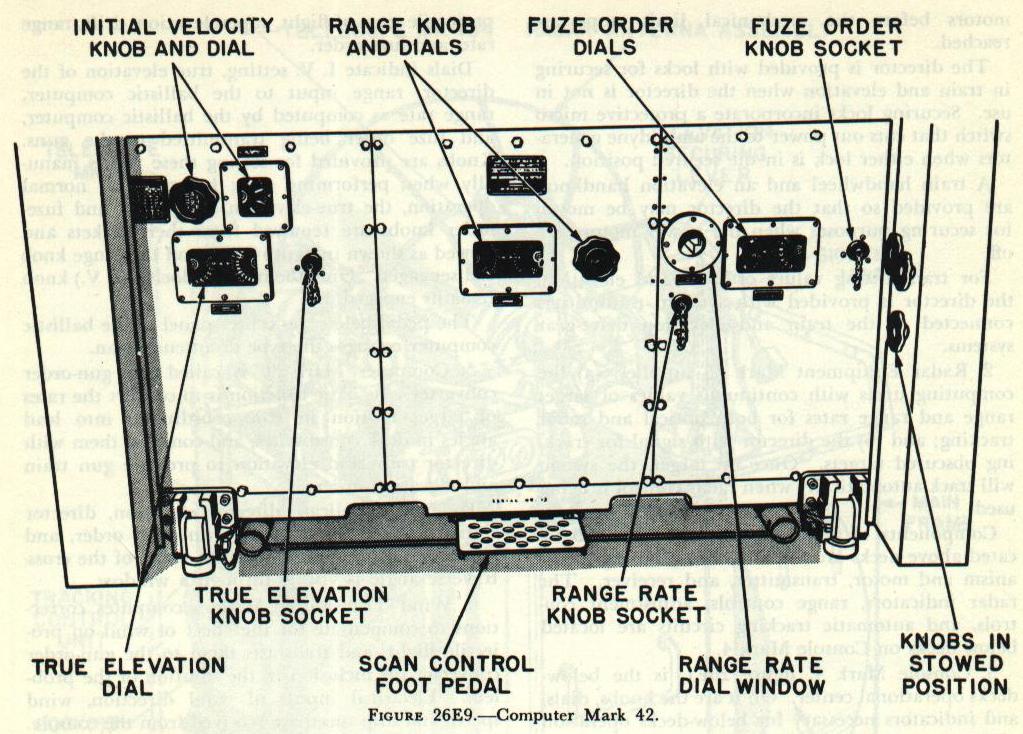 4. Computer Mark 42, figure 26E9, is the ballistics computer. Its primary function is to compute projectile time of flight, superelevation, drift, range rate, and fuze order.
4. Computer Mark 42, figure 26E9, is the ballistics computer. Its primary function is to compute projectile time of flight, superelevation, drift, range rate, and fuze order.A. Fire Control Problem
B. Basic elements of lead-computing sights
C. Gun sight Mark 15
D. Gun Fire Control System Mark 63
E. Gun Fire Control System Mark 56, Page 1
E. Gun Fire Control System Mark 56, Page 2 (This Page)
E. Gun Fire Control System Mark 56, Page 3
E. Gun Fire Control System Mark 56, Page 4
E. Gun Fire Control System Mark 56, Page 5